

-

学习时长
11周/建议每周8个小时
-

答疑服务
专属微信答疑群/讲师助教均参与
-

作业批改
每章节设计作业/及时批改评优
-

课程有效期
一年/告别拖延,温顾知新






- 第1章: 概述
- 1: 【课件】多传感器融合定位-第1讲 V2.pdf
- 第1节: 课程概述
- 2: 【视频】课程概述
- 第2章: 3D激光里程计 I
- 3: 【课件】多传感器融合定位-第2讲 V1.pdf
- 第1节: 激光雷达工作原理及课程框架
- 4: 【视频】激光雷达工作原理及课程框架
- 第2节: 基于SVD的ICP
- 5: 【视频】基于SVD的ICP
- 第3节: 基于优化的ICP
- 6: 【视频】基于优化的ICP
- 第4节: NDT理论讲解
- 7: 【视频】NDT理论讲解
- 第5节: 点云畸变补偿方法
- 8: 【视频】畸变补偿
- 第6节: 基于KITTI数据集的实现
- 9: 【视频】基于kitti的实现
- 第3章: 3D激光里程计 II
- 10: 【课件】多传感器融合定位-第3讲 V1.pdf
- 第1节: 线面特征几何基础
- 11: 【视频】线面特征几何基础
- 第2节: 点云线面特征提取
- 12: 【视频】点云线面特征提取
- 第3节: 基于线面特征的位姿优化
- 13: 【视频】基于线面特征的位姿变化
- 第4节: 位姿优化代码实现
- 14: 【视频】位姿优化代码实现
- 第5节: 开源里程计
- 15: 【视频】开源里程计
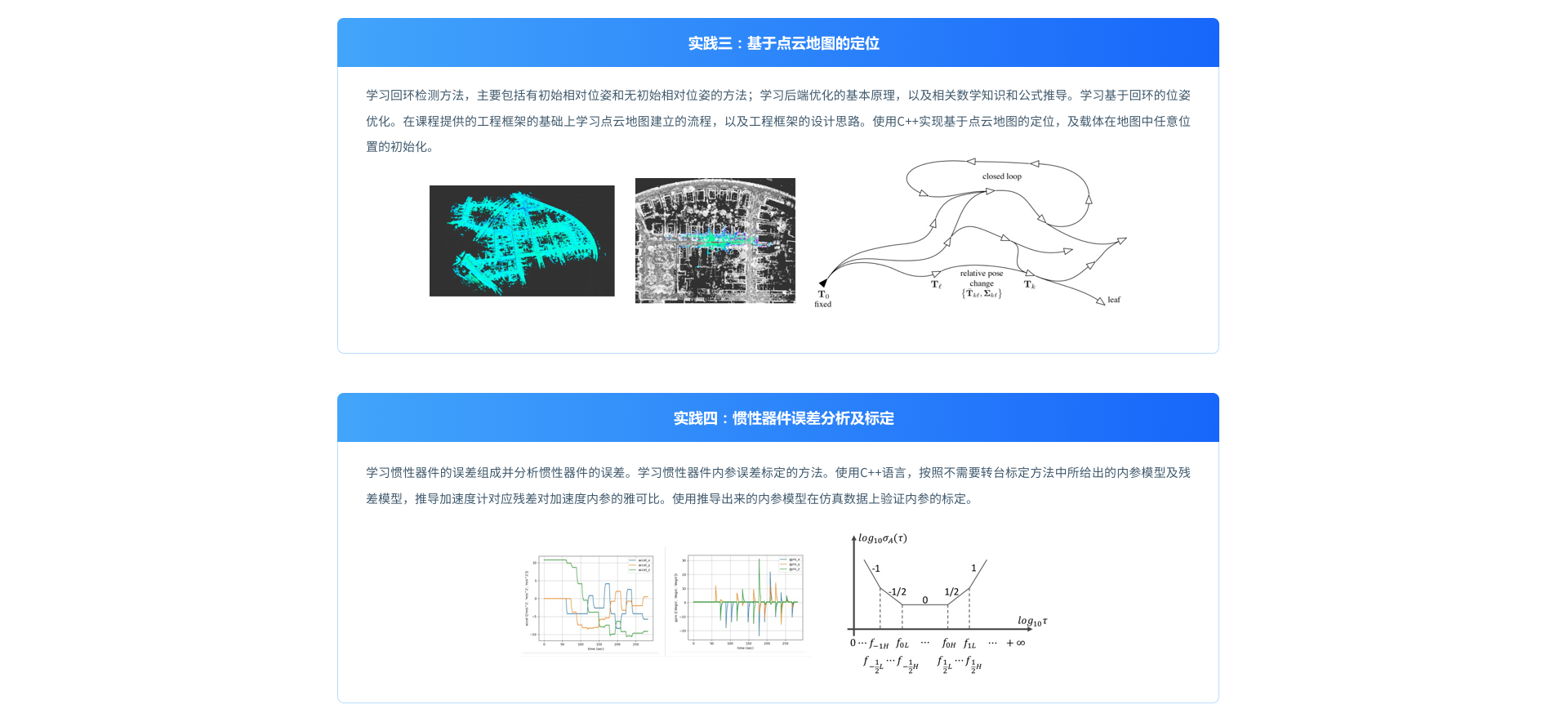
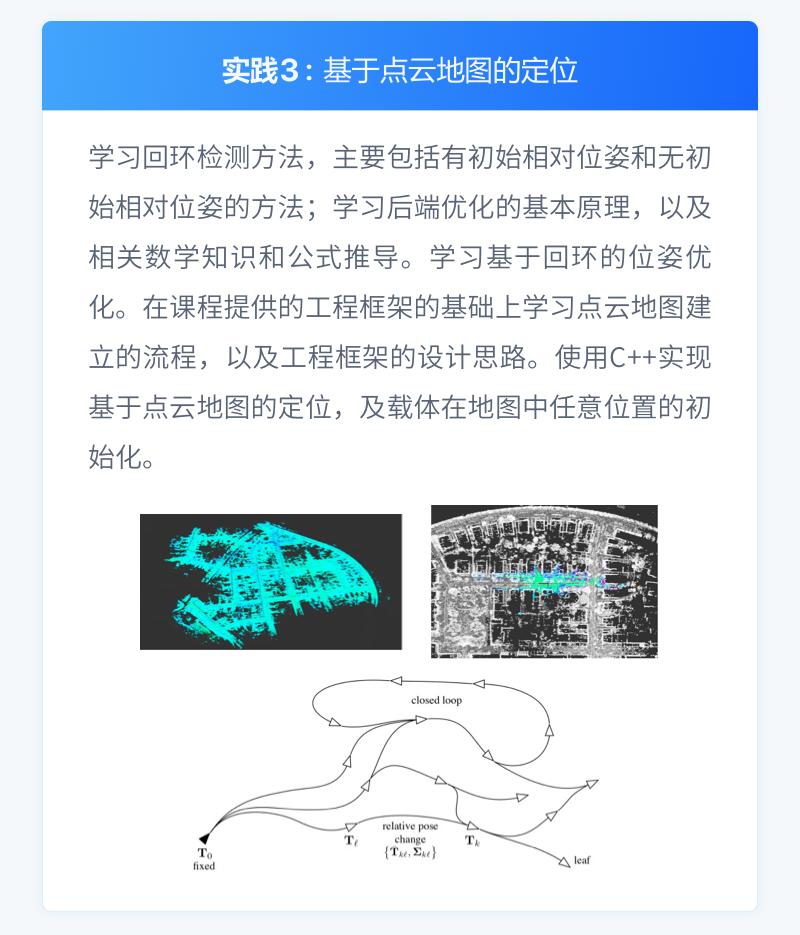
- 第4章: 点云地图构建及基于地图的定位
- 16: 【课件】多传感器融合定位-第4讲 V1.pdf
- 第1节: 整体流程介绍与回环检测
- 17: 【视频】整体流程介绍与回环检测
- 第2节: 后端优化
- 18: 【视频】后端优化
- 第3节: 点云地图建立
- 19: 【视频】点云地图建立
- 第4节: 基于地图的定位
- 20: 【视频】基于地图的定位
- 第5节: LeGO-LOAM
- 21: 【视频】LeGO-LOAM
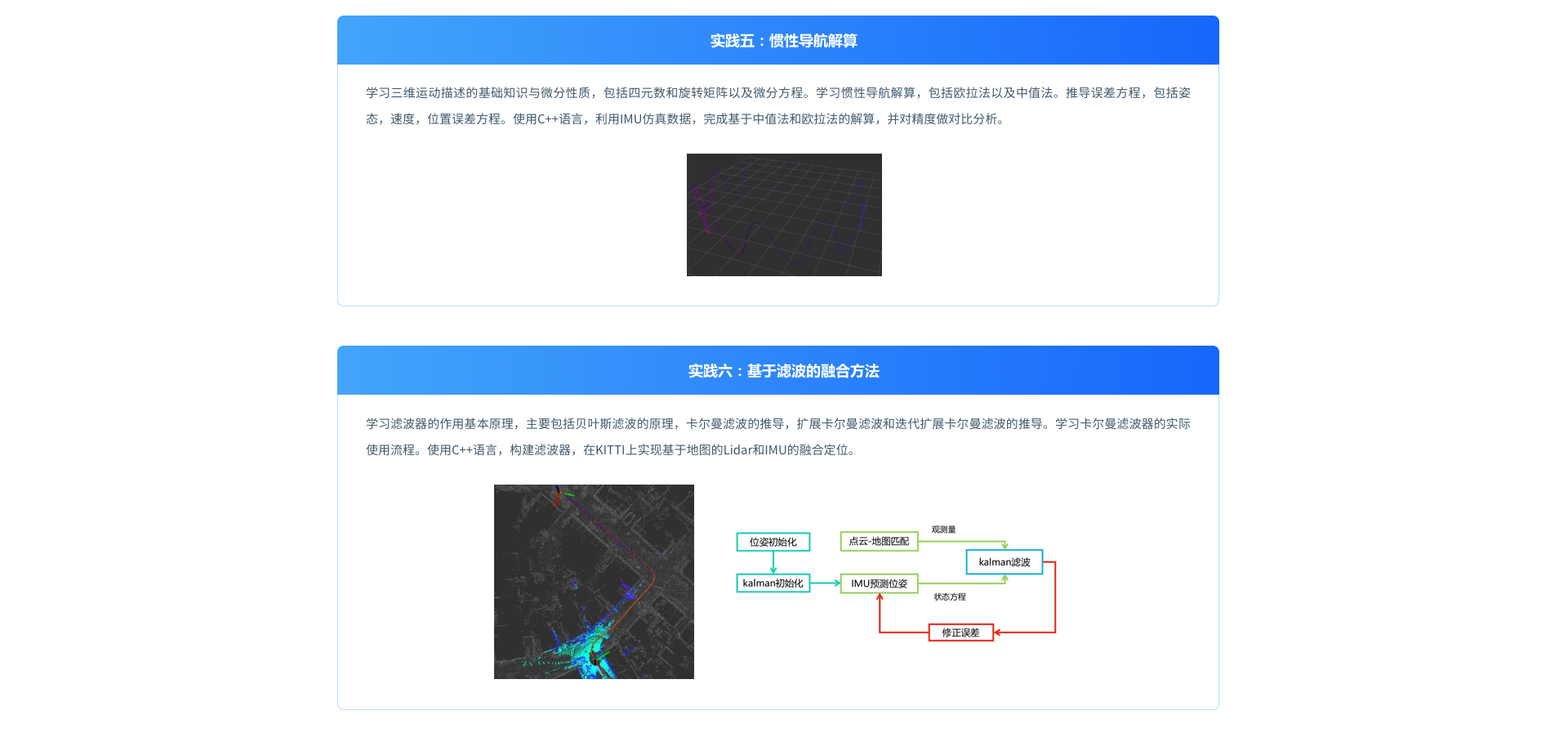
- 第5章: 惯性导航原理及误差分析
- 22: 【课件】多传感器融合定位-第5讲 V1.
- 第1节: 本节内容介绍
- 23: 【视频】内容概述
- 第2节: 惯性技术简介
- 24: 【视频】惯性技术简介
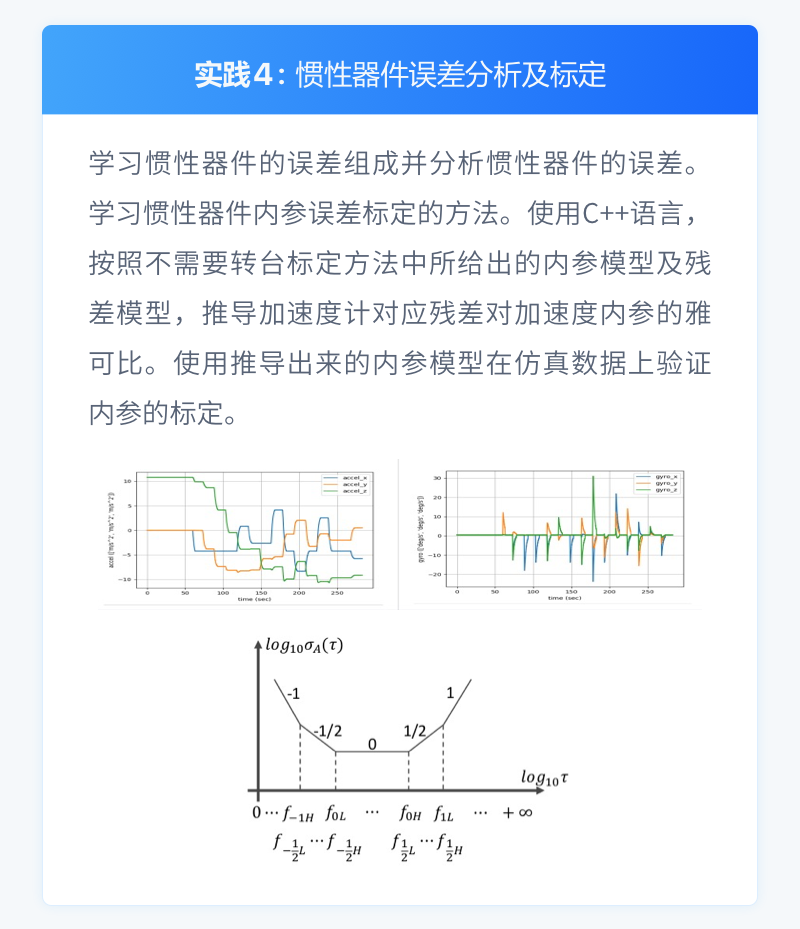
- 第3节: 惯性器件误差分析及处理
- 25: 【视频】惯性器件误差分析
- 第4节: 内参标定:内参模型、基于转台的标定方法&不依赖转台的标定方法
- 26: 【视频】内参标定
- 第5节: 惯性器件温补
- 27: 【视频】惯性器件温补
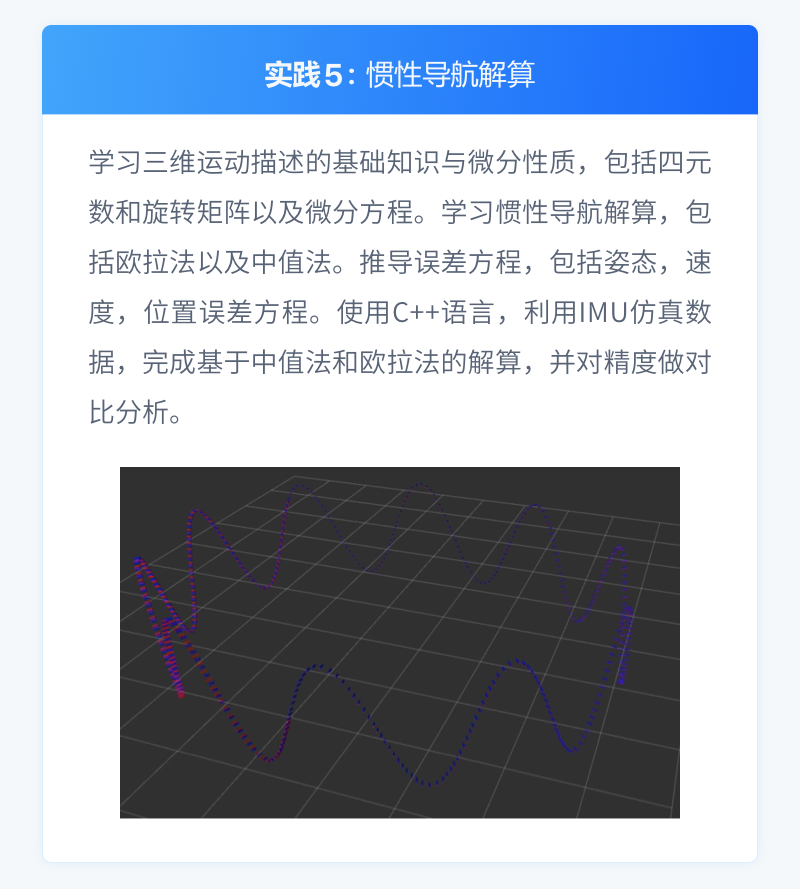
- 第6章: 惯性导航解算及误差模型
- 28: 【课件】多传感器融合定位-第6讲 V1.pdf
- 第1节: 三维运动描述基础知识
- 29: 【视频】三维运动描述基础知识
- 第2节: 三维运动微分性质
- 30: 【视频】三维运动微分性质
- 第3节: 惯性导航解算
- 31: 【视频】惯性导航解算
- 第4节: 惯性导航误差分析
- 32: 【视频】惯性导航误差分析
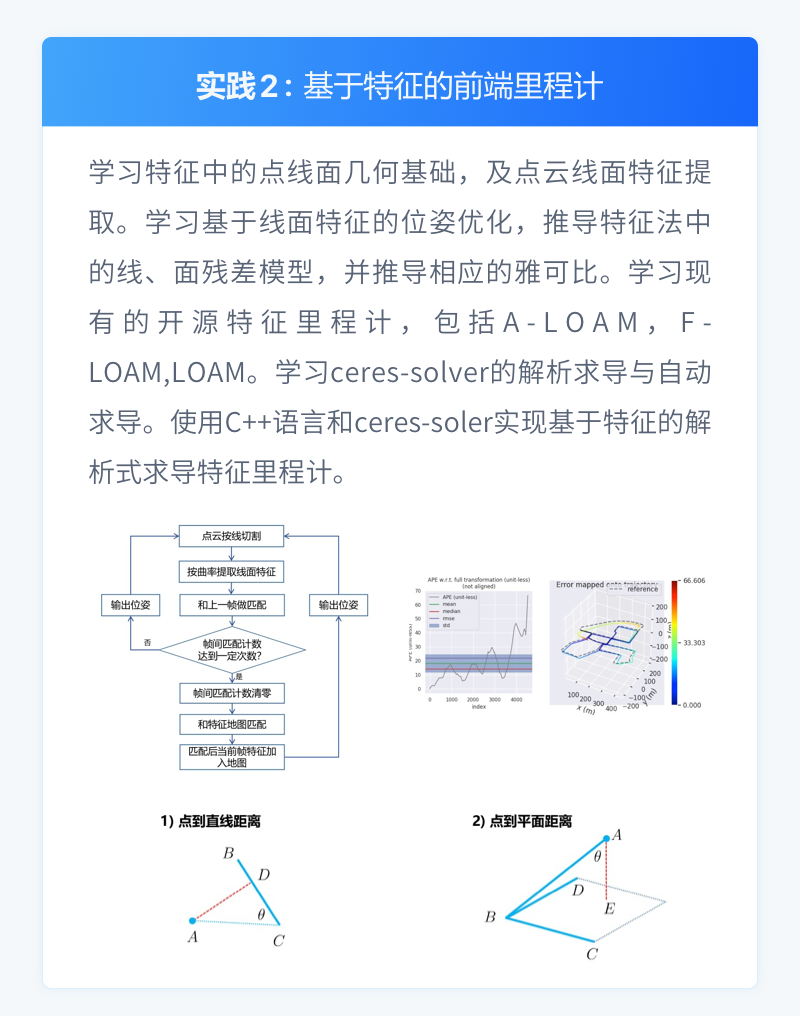
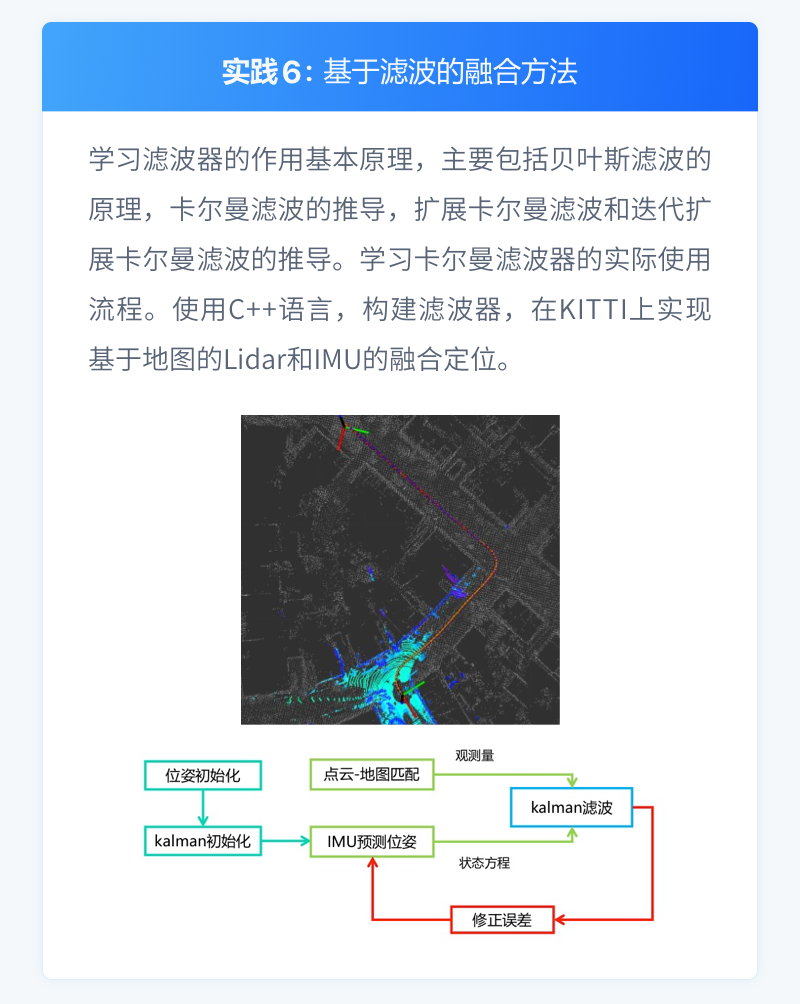
- 第7章: 基于滤波的融合方法 I
- 33: 【课件】多传感器融合定位-第7讲 V1.pdf
- 第1节: 滤波器作用
- 34: 【视频】滤波器的作用
- 第2节: 概率基础知识
- 35: 【视频】概率基础知识
- 第3节: 滤波器的基本原理
- 36: 【视频】滤波器基本原理
- 第4节: 基于滤波器的融合
- 37: 【视频】基于滤波的融合
- 第8章: 基于滤波的融合方法 II
- 38: 【课件】多传感器融合定位-第8讲 V1 (1).pdf
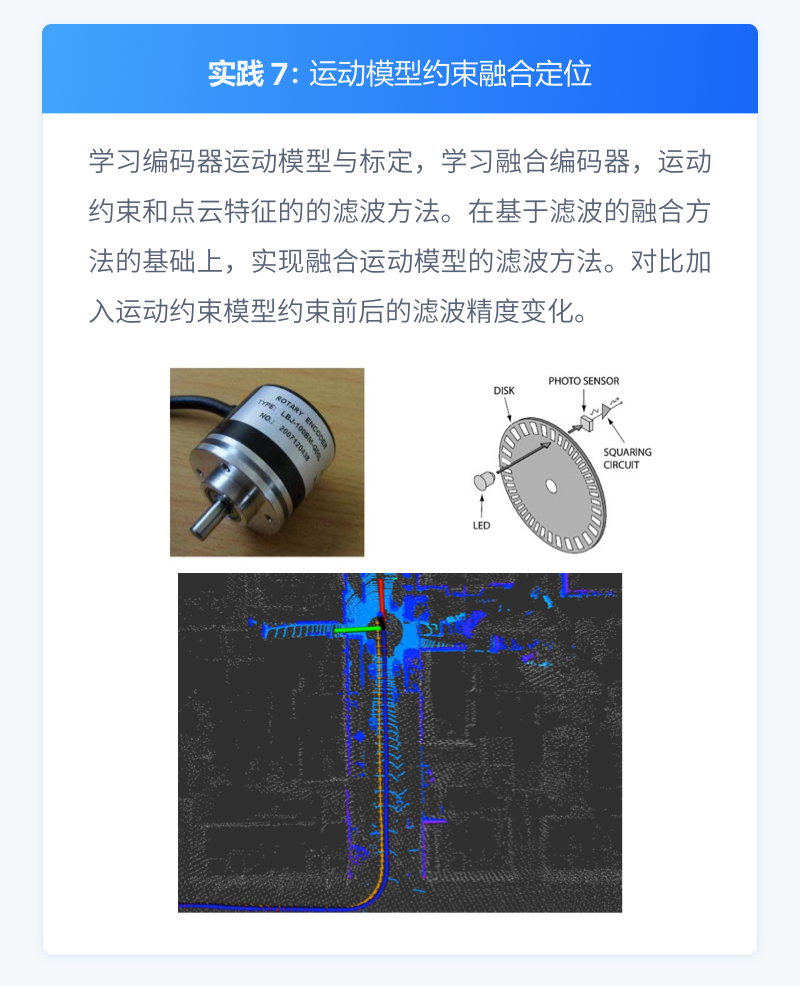
- 第1节: 编码器运动模型与标定及基于编码器的滤波
- 39: 【视频】编码器运动模型及基于编码器的滤波
- 第2节: 融合运动约束与点云特征的滤波方法
- 40: 【视频】基于运动约束与点云特征的滤波
- 第9章: 基于图优化的建图方法
- 41: 【课件】多传感器融合定位-第9讲 V1.pdf
- 第1节: 基于预积分的优化流程
- 42: 【视频】基于预积分的优化流程
- 第2节: 预积分模型
- 43: 【视频】预积分模型
- 第3节: 预积分在优化中的使用
- 44: 【视频】预积分在优化中的使用
- 第4节: 典型方案介绍
- 45-1: 【视频】典型方案介绍
- 45-2: 【视频】典型方案介绍--LIO SAM
- 第5节: 基于编码器的预积分
- 46: 【视频】基于编码器的预积分
- 第10章: 基于图优化的定位方法
- 47: 【课件】多传感器融合定位-第10讲 V1.pdf
- 第1节: 基于优化的定位简介
- 48: 【视频】基于优化的定位简介
- 第2节: 边缘化原理及应用
- 49: 【视频】边缘化原理及应用
- 第3节: 基于KITTI的实现原理
- 50: 【视频】基于kitti的实现原理
- 第4节: Lio-mapping
- 51: 【视频】Lio-mapping
- 第11章: 多传感器时空标定(综述)
- 52: 【课件】多传感器融合定位-第11讲 V1.pdf
- 第1节: 多传感器时空标定
- 53: 【视频】多传感器时空标定






 官方微信公众号
官方微信公众号

