

-

学习时长
8周左右/建议每周8个小时
-

答疑服务
专属微信答疑群/讲师助教均参与
-

作业批改
每章节设计作业/助教及时批改评优
-

课程有效期
一年/告别拖延,温故知新







- 第1章: 概述与课程介绍
- 1: 【课件】概述与课程介绍
- 第1节: 课程介绍
- 2: 【视频】课程与内容提要
- 第2节: VIO概述
- 3: 【视频】vio概述
- 第3节: 数学基础知识回顾
- 4: 【视频】预备知识回顾
- 第4节: 作业
- 第2章: IMU传感器
- 5: 【课件】IMU传感器
- 第1节: 旋转运动学
- 6: 【视频】旋转运动学
- 第2节: IMU 测量模型及运动模型:MEMS 加速度计&MEMS 陀螺工作原理
- 7: 【视频】IMU 测量模型及运动模型
- 第3节: IMU 误差模型:确定性误差、随机误差&IMU 数学模型
- 8: 【视频】 IMU 误差模型
- 第4节: 运动模型离散时间处理:欧拉法&中值法
- 9: 【视频】运动模型离散时间处理
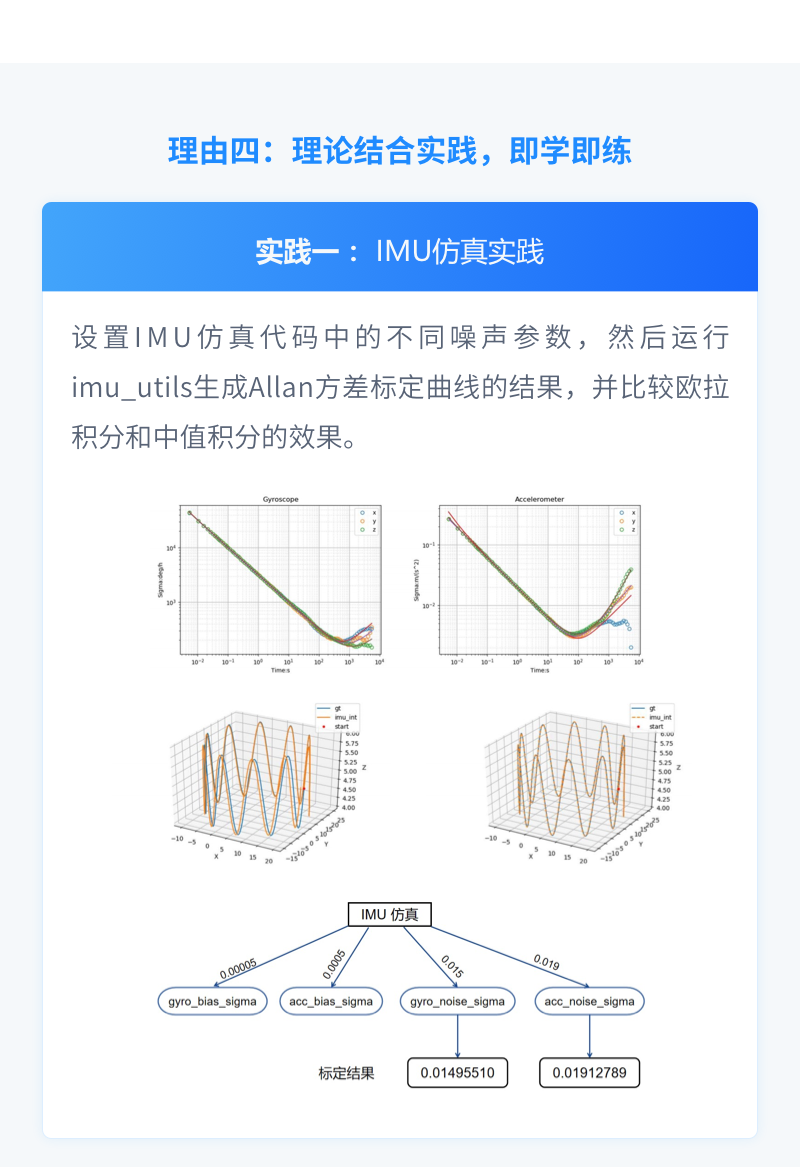
- 第5节: IMU 数据仿真
- 10: 【视频】IMU 数据仿真
- 第6节: 作业
- 第3章: 基于优化的 IMU 与视觉信息融合
- 11: 【课件】L3BundleAdjustment
- 第1节: 基于Bundle Adjustment的VIO融合
- 12: 【视频】基于Bundle Adjustment的VIO融合
- 第2节: 最小二乘问题的求解
- 13: 【视频】最小二乘问题求解
- 第3节: VIO 残差函数的构建
- 14: 【视频】VIO残差函数的构建
- 第4节: 误差Jacobian推导:视觉重投影残差的Jacobian&IMU 预积分残差的雅克比
- 15: 【视频】误差Jacobian推导
- 第5节: 作业
- 第4章: 基于滑动窗口算法的VIO 系统:可观性和一致性
- 16: 【课件】SlidingWindow
- 第1节: 从高斯分布到信息矩阵
- 17: 【视频】从高斯分布到信息矩阵
- 第2节: 舒尔补应用:边际概率, 条件概率
- 18: 【视频】舒尔补应用:边际概率, 条件概率
- 第3节: 滑动窗口算法: 图优化基础、 基于边际概率的滑动窗口算法
- 19: 【视频】 滑动窗口算法: 图优化基础、 基于边际概率的滑动窗口算法
- 第4节: 滑动窗口中的FEJ 算法
- 20: 【视频】滑动窗口中的FEJ 算法
- 第5节: 作业:第四章
- 第5章: 后端优化实践:逐行手写求解器
- 21: 【课件】L5BackendSolver
- 第1节: 非线性最小二乘求解
- 22: 【视频】非线性最小二乘求解
- 第2节: 代码讲解之单目BA求解
- 23: 【视频】代码讲解之单目BA求解
- 第3节: 滑动窗口算法
- 24: 【视频】滑动窗口算法
- 第4节: 代码讲解之Vins-Mono滑动窗口算法
- 25: 【视频】代码讲解之Vins-Mono滑动窗口算法
- 第5节: 作业
- 第6章: 视觉前端
- 26: 【课件】L6 视觉前端
- 第1节: 前端的工作
- 27: 【视频】前端的工作
- 第2节: 特征点提取、匹配和光流
- 28: 【视频】特征点提取、匹配和光流
- 第3节: 关键帧与三角化
- 29: 【视频】关键帧与三角化
- 第4节: 实践作业
- 第7章: VINS系统构建
- 30: 【课件】第七章
- 第1节: VINS初始化:初始化状态量和原理、VINS-mono初始化公式推导、其他标定或者初始化方法推荐及介绍
- 31-1: 【视频】part1
- 31-2: 【视频】part2
- 第2节: 实践:代码讲解
- 32: 【视频】代码讲解
- 第3节: 实践:作业
- 第8章: 相机和IMU时间戳同步
- 33: 【课件】相机与IMU时间戳同步
- 第1节: 基于视觉特征匀速运动模型的时间戳标定算法
- 34: 【视频】时间戳同步问题及意义
- 第2节: 基于相机轨迹匀速运动模型的时间戳标定算法
- 35: 【视频】时间戳延迟估计方法
- 第3节: 算法对比总结
- 36: 【视频】sec3 时间戳同步算法扩展
- 第4节: 作业
- 第9章: 课程总结
- 37: 【课件】总结与展望
- 第1节: 多传感器融合展望与资料推荐
- 38: 【视频】课程简单回顾
- 第2节: VIO和其他传感器融合
- 39: 【视频】vio和其他传感器融合
















 官方微信公众号
官方微信公众号

